為開闊安徽工程大學(xué)青年老師和研究生的研究視野,增強對智能控制相關(guān)領(lǐng)域研究前沿問題及研究熱點的認識,特邀請武漢科技大學(xué)柴利教授、北京大學(xué)喻俊志教授、清華大學(xué)周東華教授、上海交通大學(xué)李少遠教授、北京理工大學(xué)夏元清教授、山東大學(xué)王光臣教授、重慶大學(xué)柴毅教授、南京理工大學(xué)徐勝元教授、南京航空航天大學(xué)姜斌教授、南京郵電大學(xué)岳東教授、中國科學(xué)技術(shù)大學(xué)康宇教授、華北電力大學(xué)劉向杰教授、廣東工業(yè)大學(xué)魯仁全教授和浙江大學(xué)陳積明教授以騰訊會議方式為數(shù)學(xué)、控制、計算機和人工智能等相關(guān)學(xué)科師生做了智能控制系列專題學(xué)術(shù)報告。報告會由副校長費為銀教授主持。
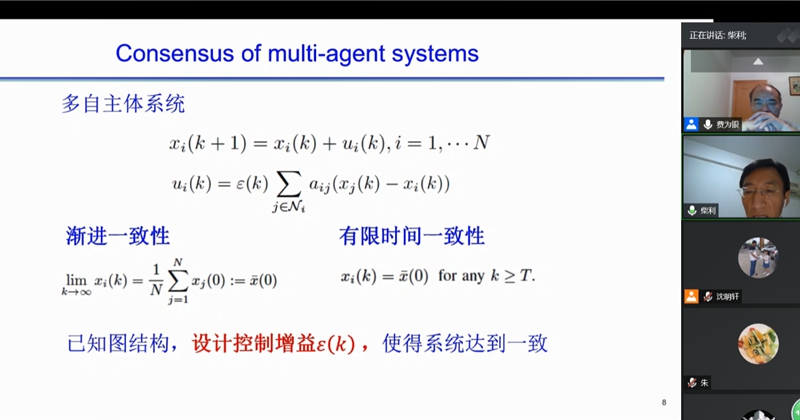
7月21日,柴利教授做了題為《多智能體系統(tǒng)平均一致性分析與綜合的圖濾波方法》的報告,他在報告中介紹了多智能體在現(xiàn)實世界中的應(yīng)用、常用的多智能體模型以及現(xiàn)有模型存在的不足。并且對如何通過建立圖拓撲結(jié)構(gòu)、控制增益與收斂率之間的直接關(guān)系函數(shù)研究一致性問題進行了詳細的分析。
喻俊志教授做了《仿生機器海豚智能控制》的學(xué)術(shù)報告,他從海洋強國戰(zhàn)略的角度出發(fā)介紹了開發(fā)海洋機器人的意義,并對仿生機器海豚智能控制的思路以及躍水機器海豚的仿生原型、具體結(jié)構(gòu)和基本參數(shù)進行了分析。他還對他在定深運動控制、定向運動控制、平面路徑控制及躍水運動控制等智能運動控制方面所做的工作進行了介紹。
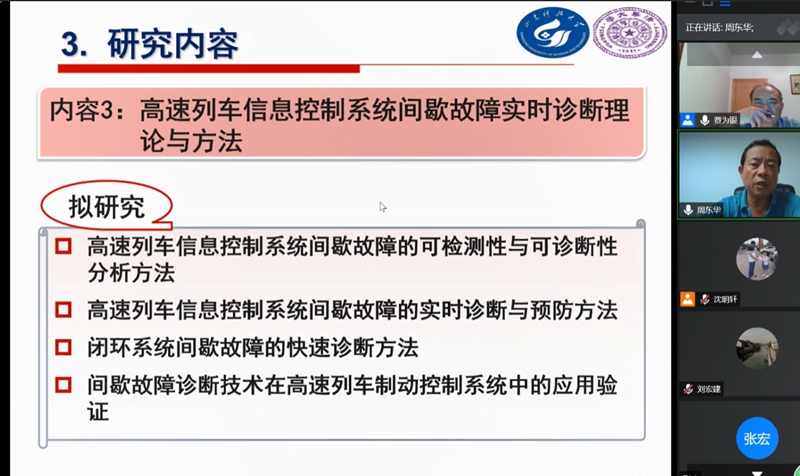
7月24日,周東華教授做了題為《高速列車制動系統(tǒng)實時故障診斷技術(shù)》的學(xué)術(shù)報告,他針對高速列車制動系統(tǒng)實時故障診斷技術(shù)科學(xué)問題提出了五個研究內(nèi)容,并重點介紹了高速列車信息控制系統(tǒng)制動系統(tǒng)間歇故障實時診斷的理論和方法。
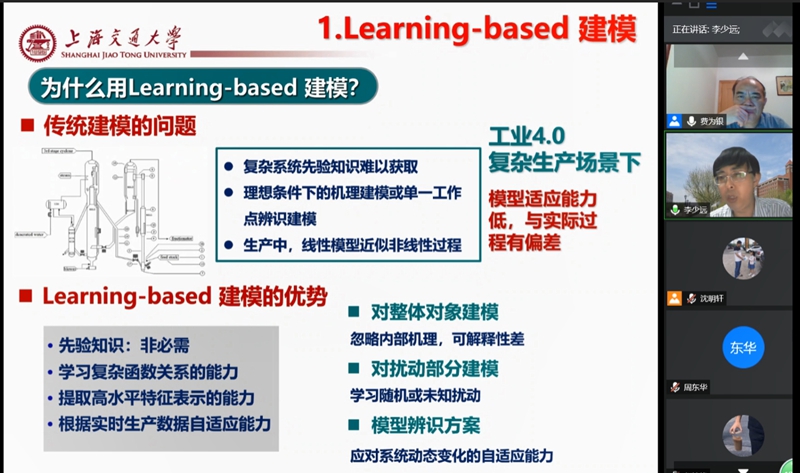
李少遠教授做了題為《基于“智能”增強的預(yù)測控制》的學(xué)術(shù)報告,他在報告中首先對預(yù)測控制的發(fā)展及其應(yīng)用和“系統(tǒng)賦能”的技術(shù)方法進行了介紹,隨后重點分析了Learning-based MPC模型。
7月26日,夏元清教授做了題為《火星探測器進入、下降與著陸過程的導(dǎo)航、制導(dǎo)與控制:“恐怖”七分鐘”》的學(xué)術(shù)報告,他在報告中介紹了火星探測的意義、火星探測發(fā)展的歷史、中國探測火星的發(fā)展歷史,并重點介紹了探測器在進入、下降與著陸過程存在的挑戰(zhàn)及關(guān)鍵問題。
王光臣教授做了題為《An asymmetric information mean-field type LQ stochastic Stackelberg differential game》的學(xué)術(shù)報告,他首先簡單介紹了問題的研究動機和一般性問題的構(gòu)造,隨后他對Stackelberg的解進行了詳細分析,并給出一些特殊情形下的顯示解進行研究。
7月28日,柴毅教授做了題為《非平穩(wěn)過程智能監(jiān)控與故障診斷》的學(xué)術(shù)報告,他在介紹了研究背景和非平穩(wěn)過程監(jiān)測信號分析后,重點對基于監(jiān)測數(shù)據(jù)的異常工況在線檢測和數(shù)據(jù)驅(qū)動的非平穩(wěn)過程智能故障診斷進行了詳細的分析。
徐勝元教授做了題為《一類時滯系統(tǒng)的自適應(yīng)控制》的學(xué)術(shù)報告,他首先對自適應(yīng)控制概念、方法進行了介紹,然后針對一類不確定時滯系統(tǒng),在參數(shù)上界未知的情形下,設(shè)計了自適應(yīng)控制器,并從理論和數(shù)字機算例說明了方法的有效性。
7月31日,姜斌教授做了題為《自適應(yīng)故障診斷和重構(gòu)控制及其飛控應(yīng)用技術(shù)》的學(xué)術(shù)報告,他對自適應(yīng)控制的研究背景及現(xiàn)狀首先給予了介紹,隨后對自適應(yīng)故障調(diào)節(jié)及其在飛行控制中的技術(shù)應(yīng)用給予了詳細分析。
岳東教授做了題為《有源配電網(wǎng)優(yōu)化協(xié)調(diào)控制及應(yīng)用》的學(xué)術(shù)報告,他首先對問題的研究背景及技術(shù)挑戰(zhàn)和難點進行了介紹,隨后分析了研究思路和系列的創(chuàng)新點,并對團隊所取得的成果進行了介紹。
8月4日,康宇教授做了題為《機動車尾氣遙感檢測技術(shù)及應(yīng)用》的學(xué)術(shù)報告,他首先就城市機動車尾氣遙感監(jiān)測的研究背景進行了介紹,隨后對現(xiàn)有檢測方法的不足進行了分析,并對道邊機動車尾氣排放遙測技術(shù)進行了詳細的分析。
劉向杰教授做了題為《發(fā)電過程數(shù)據(jù)驅(qū)動模型預(yù)測控制》的學(xué)術(shù)報告,他在報告中對發(fā)電廠模型預(yù)測控制及經(jīng)濟模型預(yù)測控制器設(shè)計進行了詳細的分析和介紹,并對相關(guān)研究成果進行了解說。
8月6日,魯仁全教授做了題為《無人自主系統(tǒng)研制》的學(xué)術(shù)報告,他對他們團隊在無人機自主研發(fā)平臺、無人車集成組裝、無人車自主研發(fā)和無人駕駛技術(shù)等方面的研究進行了介紹。

陳積明教授做了題為《大數(shù)據(jù)隱私及其保護技術(shù)》的學(xué)術(shù)報告,他在報告中分析了隱私保護的基本思想、典型信息保護技術(shù),并對他在隱私保護相關(guān)成果中的思想、算法及應(yīng)用進行了分析。
本次系列報告會使得參會老師和研究生對智能控制的發(fā)展及應(yīng)用有了更直觀和深刻的理解,參會師生均表示受益匪淺。此次報告對我校數(shù)學(xué)、控制、計算機和人工智能等相關(guān)學(xué)科的發(fā)展有著重要指導(dǎo)意義。
(文/圖:沈明軒;審核:吳小太)
版權(quán)所有 安徽工程大學(xué) 皖I(lǐng)CP備10016294號
數(shù)理與金融學(xué)院 地址:安徽蕪湖市北京中路 郵編:241000 電話0553-2871142
訪問量: